It's not just a cute plane flying around.It's how it determines its flight path as it monitors the target, avoids hazardous areas and unexpected threats while considering the location of a moving base station. It is interpreting information in a new way. |
|
|
It's using "KEEL Technology" to determine "what to do and how to do it". |
Visions for next generation US military systems (Future Combat Systems for the Army, Sea Power 21 for the Navy, and Vision 2025 for the Air Force) all assume the existence of autonomous devices to reduce costs and keep humans out of harms-way. However, only with advanced computing technologies will these devices be able to satisfy the needs. While limited levels of autonomy can be achieved using conventional rule-based systems (where actions are scripted to respond to events), this approach is insufficient to address future needs. Hard coding solutions to complex, dynamic, non-linear, interrelated, multi-dimensional problem sets creates brittle solutions that are difficult to code, manage and debug. Compsim's KEEL Technology provides the necessary services to control costs and improve capabilities. Flexibility and Extensibility are key services offered by KEEL Technology.
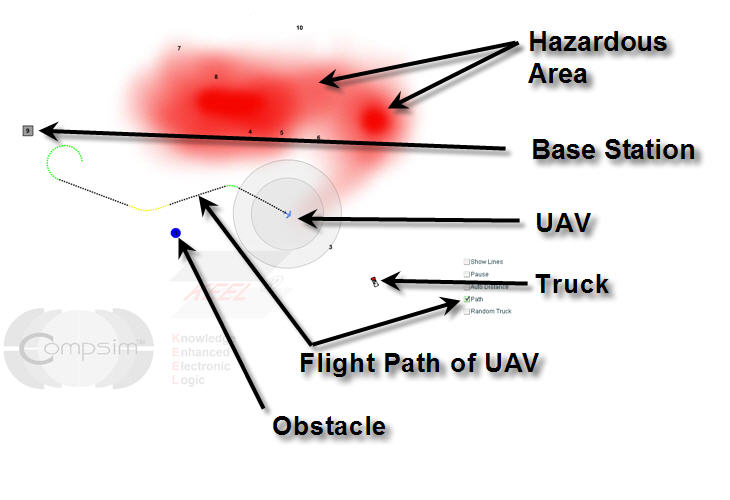
This demonstration focuses on the use of UAVs to track vehicles for surveillance purposes. The UAV has to exercise judgment to determine the best way to achieve this goal, while at the same time exhibiting concern for its own safety. It must balance the need to watch the vehicle while at the same time maintaining contact with the ground base station that will distribute the images to ground personnel. Policies that describe how information is to be interpreted are described with the KEEL "dynamic graphical language" and implemented as a KEEL Engine for the UAV. The UAV must continually observe the moving truck as well as obstacles and the base station, any or all of which can move at any time.
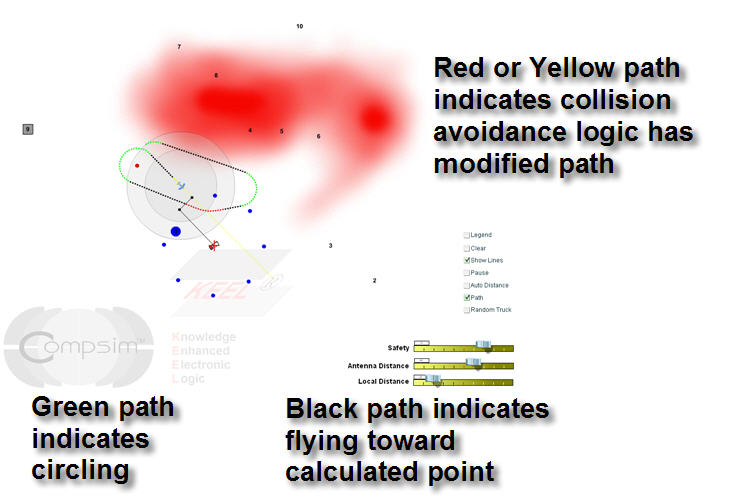
Collision Avoidance
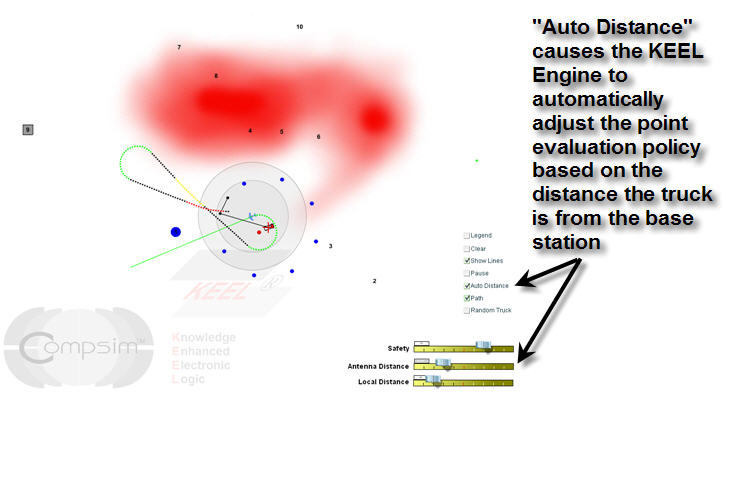
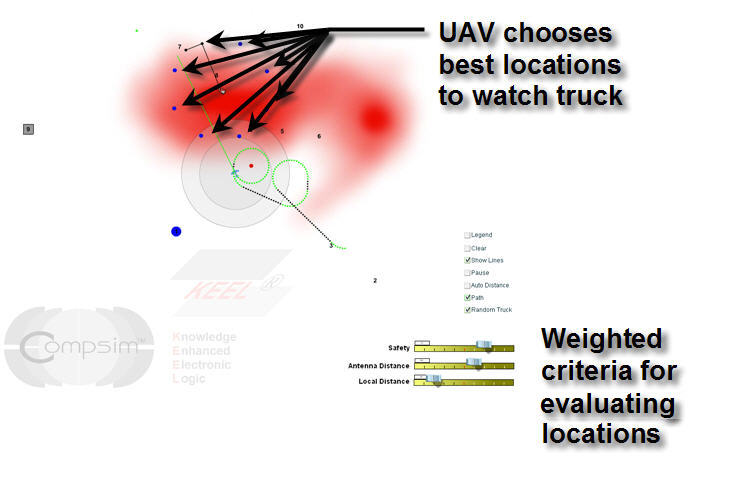
Select the Show Lines checkbox to show the potential and selected observation locations, the evaluation criteria, and the legend.
Select the Path checkbox to show the path history of the UAV.
Select the Random Truck checkbox to continuously redirect the truck to new locations.
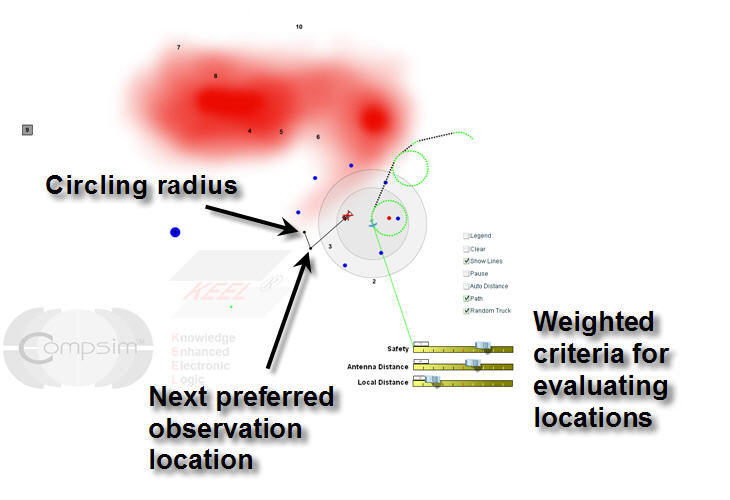
Select the Auto Distance checkbox to activate the adaptive policy where the Antenna Distance criteria for evaluating points is automatically adjusted based on the distance the truck is from the base station antenna.
Click on the background of the map to cause the truck to move toward that point.
Drag and drop the base station antenna to reposition it on the map.
Drag and drop the obstacle (blue dot) to reposition it on the map (move it in front of the UAV and watch the UAV maneuver around it).
Adjust the impact of Safety, Antenna Distance, and Local Distance criteria items to control the KEEL-based policy.
This simple demonstration evaluates 8 points around the truck as potential observation points. In the real world, map information with roads may contribute to the decision. There may be other map information that would suggest other preferred points or locations that would not be valid (mountains, etc.). Also, multiple UAVs might collaborate to determine how best to monitor the truck. There might be a transition of responsibility from one UAV to another. The truck might go into hiding, and the UAV(s) would have to determine what to do. All of these models can be easily created with KEEL Technology. The UAVs might transition from a surveillance mode to an attack and destroy mode. Examples of this type of reasoning can be found in the other UAV demonstration and the Adaptive Targeting demonstration.
|
Copyright , Compsim LLC, All rights reserved |