![]()
The initial phase of this demonstration is to use KEEL Engines to control speed transitions and to control turning patterns. Both of these functions are judgmental actions performed by human drivers. They base their actions on their driving experience, the vehicle they are driving (handling characteristics), their "need for speed".... They may or not be consciously considering fuel consumption or wear and tear on the vehicle. They may or may not be considering their own comfort or the comfort of their passengers.
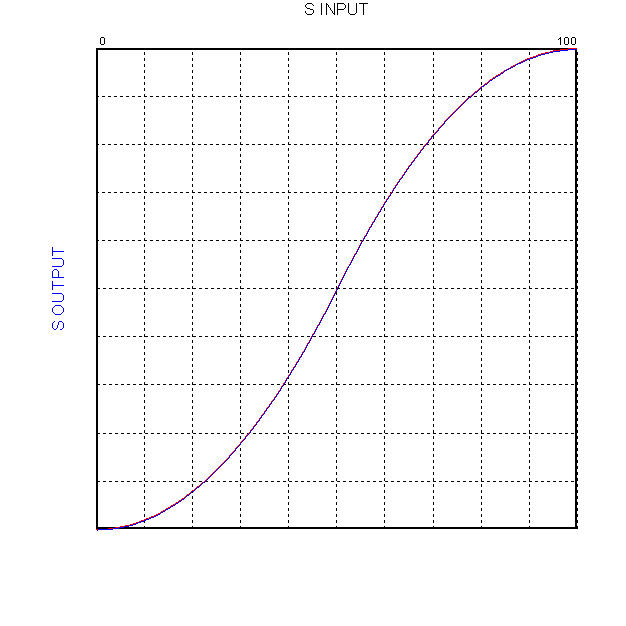
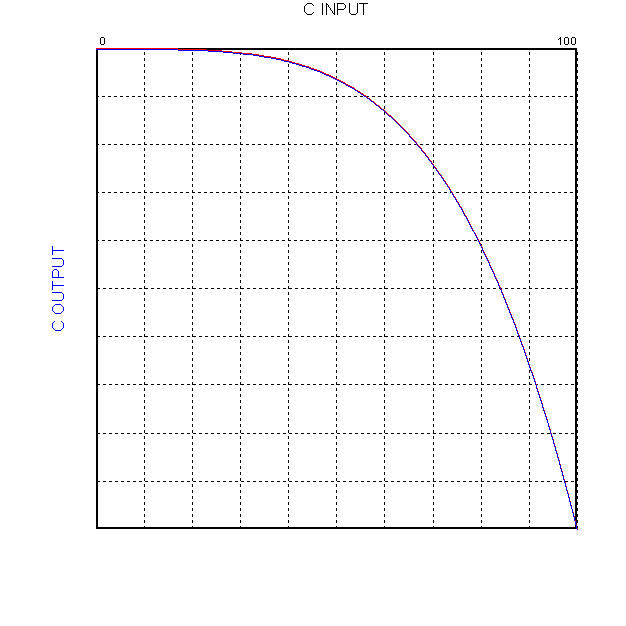
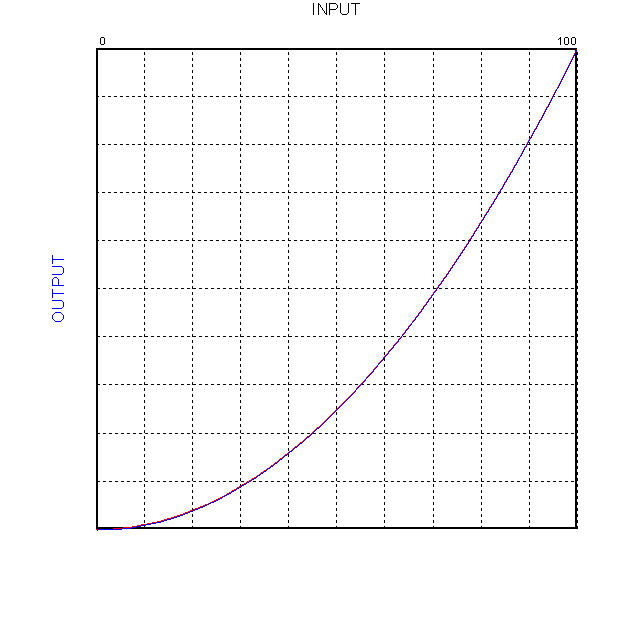
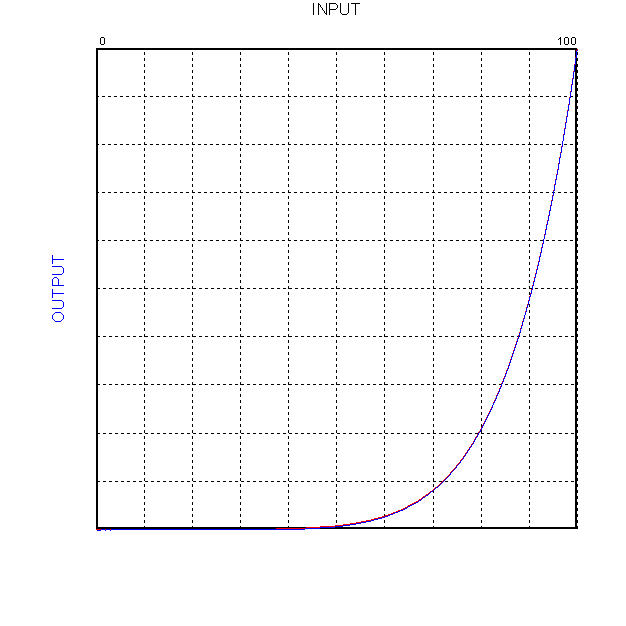
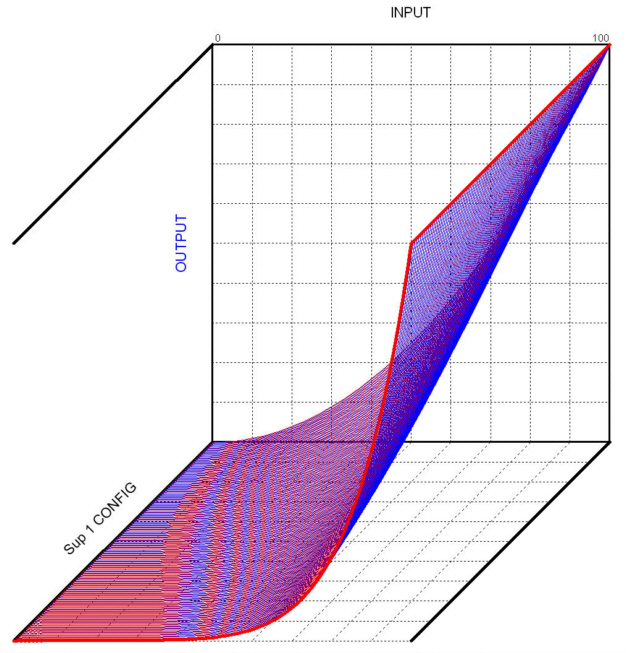
The speed control portion of phase 1 attempts to control acceleration and deceleration for comfort and fuel efficiency by making all adjustments gradually. Acceleration from stopping to a target speed is according to an S curve, where the speed starts slow (low acceleration slope), then rises toward the target speed rapidly (high acceleration slope), and finally reaches the target speed gradually (low acceleration slope). Acceleration from one speed to a higher speed and deceleration from one speed to a lower speed each transition through similar S curves. Deceleration from speed to a stop, however, follows a different profile. In this case, the speed slope transitions from a low slope (original speed) to vertical (stopped) in a concave shaped curve.
The second part of phase 1 is to address turning. When a human drives a vehicle, the human must be concerned with both the front of the vehicle and the back of the vehicle. (Unlike a railcar, the rear wheels of the vehicle do not pass through the same exact points as the front wheels when going around a corner. It depends on the radius of the turn.) Assuming that the vehicle stears by turning the front wheels only the human driver must be concerned with both front and back ends of the vehicle. A very sharp turn of the steering wheel could have the rear wheels jumping over the corner curb.
There is very little interaction with this demo. There is a Start button that will start the car and there is a slider that allows the user to tune the shape of turns. The vehicle will start from a stopped position and accelerate to 50 MPH and proceed to the first intersection, where it will come to a complete stop. It will then accelerate to 20MPH through a right turn. When it completes the right turn, it will accelerate to 50 MPH. Before it gets to the second intersection, it will decelerate to 20 MPG. It will navigate the second intersection at 20 MPH. When it completes the turn it will accelerate to 70 MPH. It will decelerate to 20 MPH through the third intersection while making a right turn again. There it will begin accelerating toward 100 MPH, but will get to the fourth intersection and decelerate to 50 MPH and accelerate back to 100 MPH. It will loop forever.
Phase 2 focuses on obstacle avoidance. It will make judgmental decisions about how to address obstacles. The decision may be to avoid the obstacle by going around it to the left or right. To stop and wait for the obstacle to be removed, or to proceed through the obstacle depending on its significance and the other options. KEEL technology allows the reasoning models to be developed with relative ease. Different conditions can be analyzed and tested within the KEEL Toolkit before deployment, even to a simulated environment like this. Different approaches to collision avoidance can be tested. System sensitivity can be tested.
|
Copyright , Compsim LLC, All rights reserved |